Summary#
For CSE 237D at UCSD, I led a group of 5 students in building a sub-$200 robotic hand with fingertip force-sensing resistors, allowing the hand to grasp without crushing. We then stretched and added vision, VR teleop, and simulation, then mounted it on a teleoperated 6-DoF robotic arm.
GitHub: cse-145-237d-tactile-hands
Hardware#
The hand is the AmazingHand from Pollen Robotics. It has 4 fingers and 8 Feetech SCS0009 servos, two per finger.
We put four Pololu FSR #2728 sensors on the fingertips. Each one sits in a 48kΩ voltage divider read by the ESP32-S3’s 12-bit ADC. The firmware samples all four channels at 100 Hz, converts the raw counts to force with the per-sensor calibration below, and streams a timestamped CSV line over USB at 115200 baud. The board is a protoboard with vertical headers for the FSR leads, and some status LEDs, all in a 3D-printed enclosure on the back of the hand. Power comes from a 2S LiPo (7.4 V) stepped down to 5 V by a buck converter.

On the host, a ROS 2 node parses the serial stream and publishes calibrated forces on /tactile/forces, and forwards target servo positions back on /servo/commands. The webcam, VR, and sim inputs all output to that same servo interface, so we could build them in parallel and swap them in and out.
Calibration#
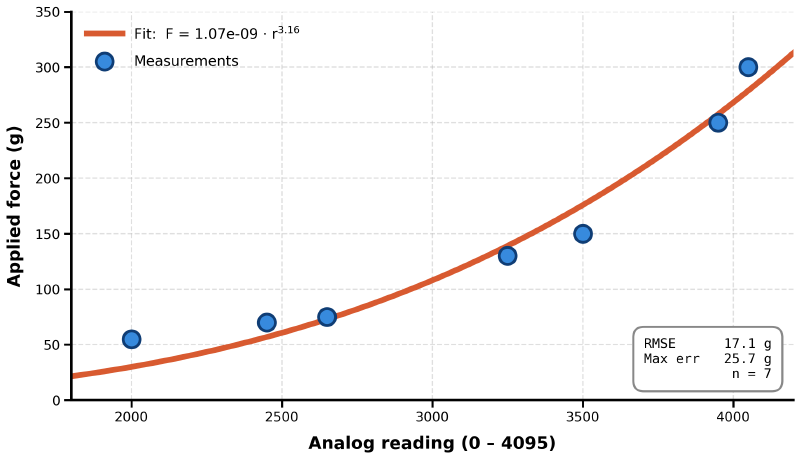
FSRs are nonlinear and quite noisy, so getting good data out of them was challenging. Shree built a 3D printed plate that alloweed stacking reference weights, then logged raw ADC at seven points. A power-law fit F = 1.07e-9·r^3.16 came out to 17.1 g RMSE and 25.7 g max error.
Force-aware grasping#
With force calibrated, the control loop follows the commanded finger close amount while monitoring that finger’s live force. The moment the force crosses a safe threshold, it stops allowing further finger closing, and the red status LED turns on.
Reach goals#
After the MVP was done at week six, each of us took one reach goal and worked on it in parallel, then integrated at the end.
Vision#
Thomas built a webcam pipeline with MediaPipe Hands and OpenCV. It reads per-finger curl from the tracked joints and maps it to servo commands, so the hand copies your hand.
Simulation#
Ali ran the AmazingHand in MuJoCo and trained an in-hand cube-rotation policy. We ran out of time to transfer to the real hardware unfortunately.

VR teleop#
Sidath worked on the Quest 2 teleoperation portion of the project. We wanted to use the Quest 2, but we had difficulty using existing ROS2 bridge APKs from existing users. Ultimately I switched to Valve Index controllers, which were significantly easier to use in Python with OpenVR. Fortunately the controllers still have per-finger curl using capacitive touch sensors. In ROS2, the controller provides both the 6-DoF pose and a per-finger curl signal on /servo/commands, so the user’s fingers control the hand while the pose moves the arm.
We started by using the controller in simulation to avoid destroying hardware.
ARCTOS arm#
Then we mounted the hand on a 3D-printed ARCTOS 6-DOF arm.
Force-aware grasping, in the loop#
For our final demo we showed that force aware grasping clearly prevents a thin-walled cup from being crushed.
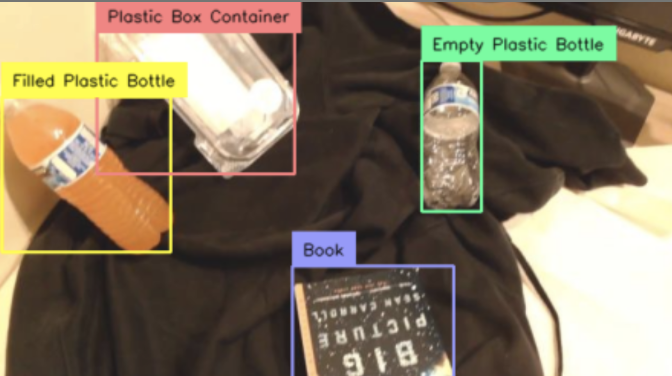
Vision-guided grip selection#
Ali also fine-tuned a YOLO26 detector on a small custom-annotated dataset (filled vs. empty plastic bottle, a box, a book) so the hand could pick a grip force per object.
Future Work#
The fingers support limited adduction/abduction, but we found that pose estimation for those dimensions was noisy so we disabled it. Additionally the Valve index controllers do not support adduction/abduction.
The force loop is reactive only, so we found that closing the grip quickly would overshoot the threshold. Predicting force a step ahead would fix it, but would have its own issues.
Per-finger calibration data, and performing off-axis characterization of the force sensors. Then, using this data and plugging it into the simulator to improve sim-to-real performance.
The arm IK and smoothing still need work before it can do reliable autonomous pick-and-place.
The AmazingHand also doesn’t have much reach or grip range, so it does better on bigger objects like a cup than on small ones.