Demo#
Summary#
This project is a proof-of-concept of what adding both vision and voice input to a prosthetic could enable for advanced control.
Existing Research#
Current research has already done automatic grasp selection using vision: PMC5325038. Other research has used vision with EMG trigger for prosthetic grasp selection: frobt.2024.1312554. Other research has targeted robotic arms for LLM-based grasp selection: arXiv:2310.05239. However no project combines all methods into a Vision+Language EMG-triggered prosthetic project.
Implementation#
Hardware#
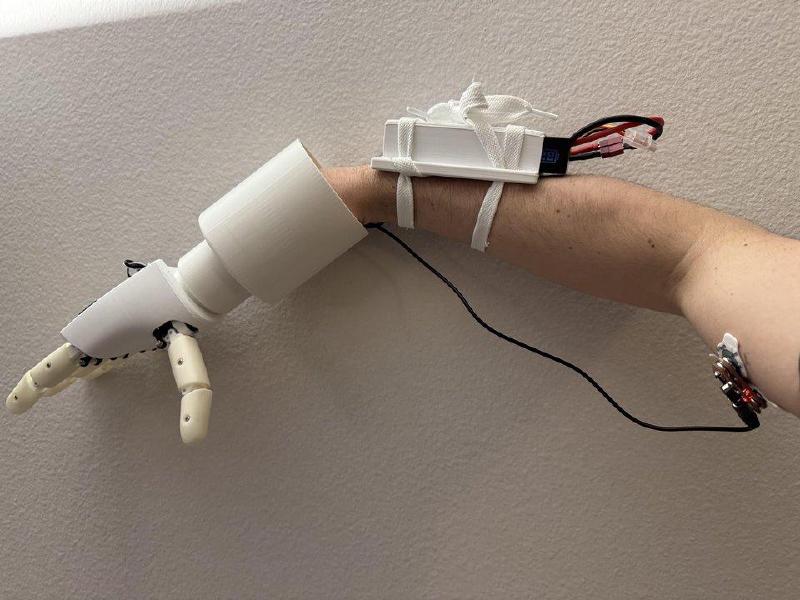
This project uses the AmazingHand from Pollen robotics: AmazingHand.
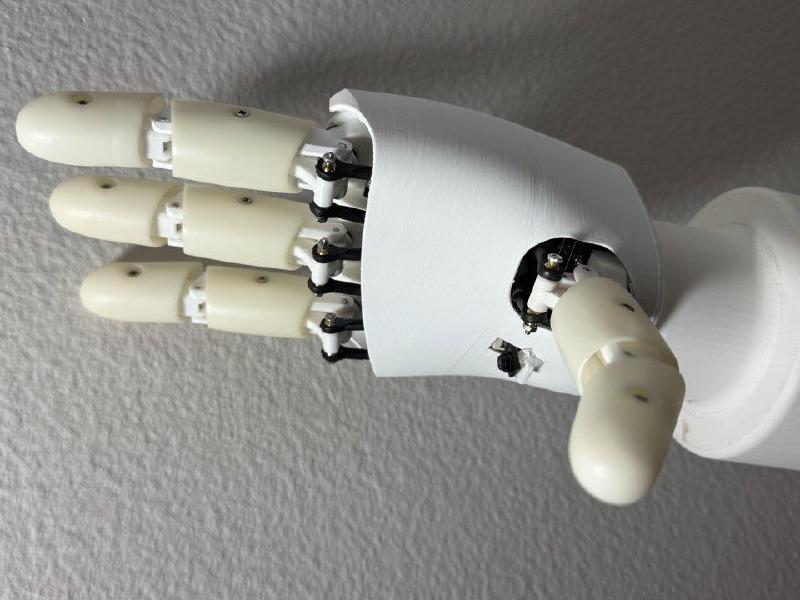
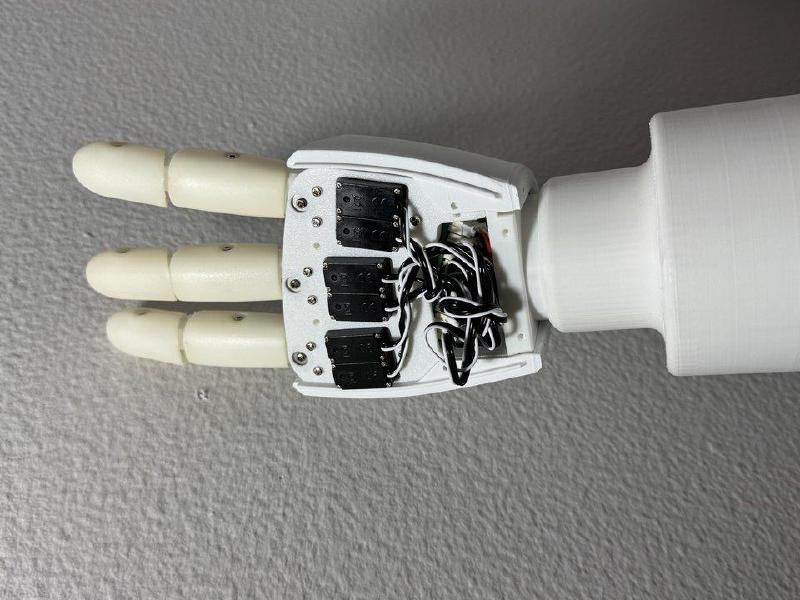
The AmazingHand is a 8-DOF 4-finger robotic hand with 8 Feetech SCS0009 servos.
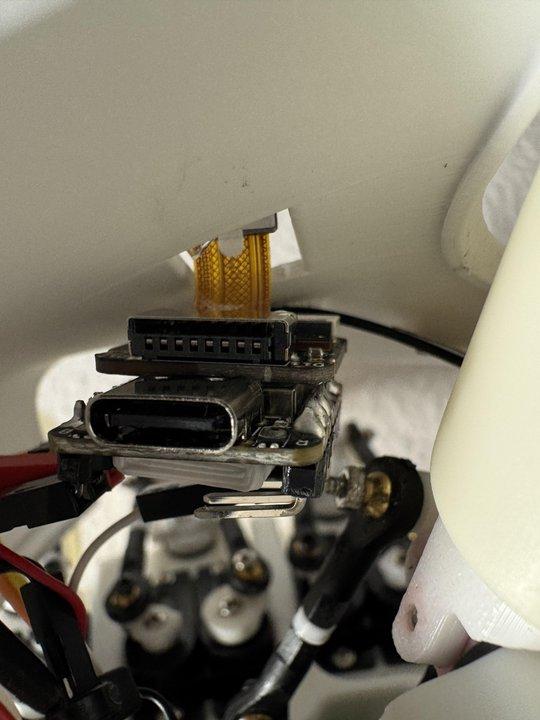
I modified the palm plate to fit a XIAO ESP32 Sense: XIAO ESP32S3 Sense, which provides a camera, microphone, WiFi, and BLE in a tiny low-cost package.

For power, the servo bus adapter is placed inside the prosthesis grip.

A 2S RC battery connects to a buck converter down to 5V, which powers the whole system.
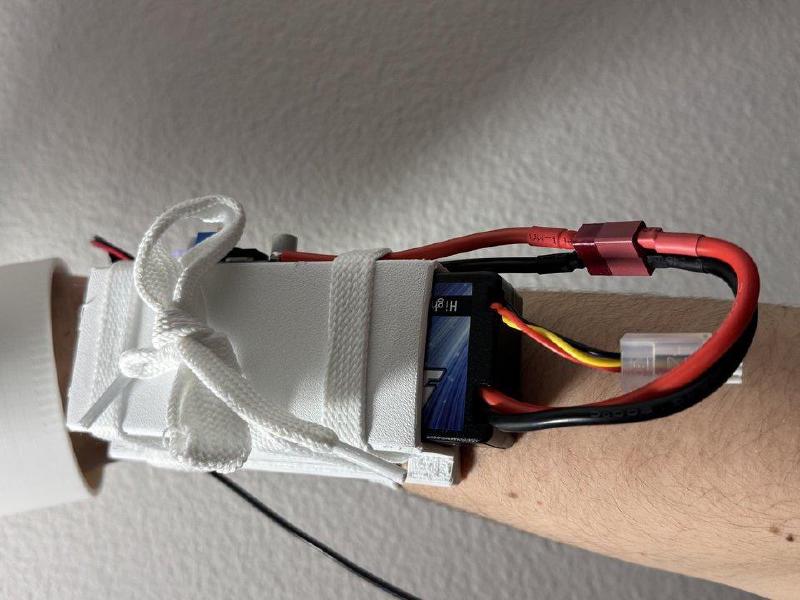
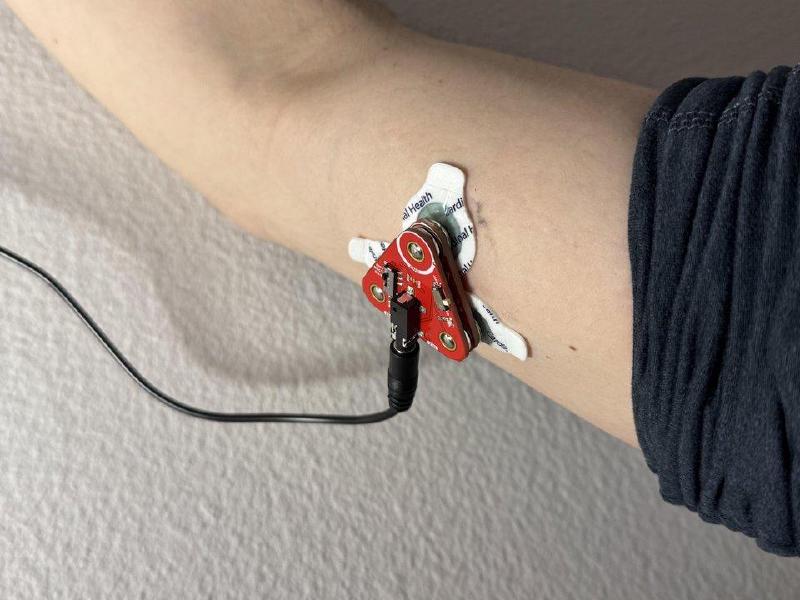
After a grip is selected, the user toggles the grip on/off using a Myoware EMG sensor.
Software#
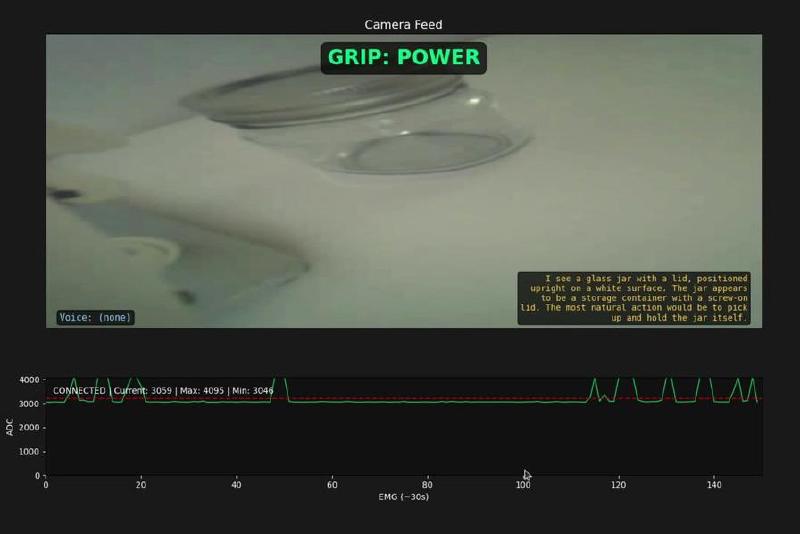
The XIAO ESP32 Sense captures images every 15 seconds, while recording audio in between the images. It connects to the configured WiFi network and makes HTTP requests to a local computer.
The local computer runs a Python web server that receives the audio and image. It sends the audio to Groq cloud for transcription (free) and then sends the image plus transcript to Claude Sonnet 4.5 (paid, ~$0.0025/image). The system prompt asks for a grip selection, which is then sent back to the ESP32.

The ESP32 receives the new grip, or none if no object was confidently identified. Then, it waits for the EMG to exceed a threshold. When it is crossed, the grip is toggled on/off.
The ESP32 communicates using UART with a Servo Bus Adapter board to control the Feetech motors.
Possible Future Features#
Currently there is no way to know what grip was selected. This could be informed using vibrational motors with specific patterns.
Grips are either 100% on or 100% off. I am unsure how to solve this.
EMG sensing was extremely flaky with my setup. I struggled to trigger the grips consistently.
A future iteration of this project could use a wrist joint. Then the camera could servo the hand towards the targeted object.