Paper#
Haptic Glove Paper#
Summary#
The N2D Glove aims to solve the issue of effectively teleoperating a multi-DoF robotic hand.
Current teleoperation systems use IMUs for tracking finger position, and provide force information using haptic motors or vibration pads. Current offerings at most provide active force feedback in one-dimension.
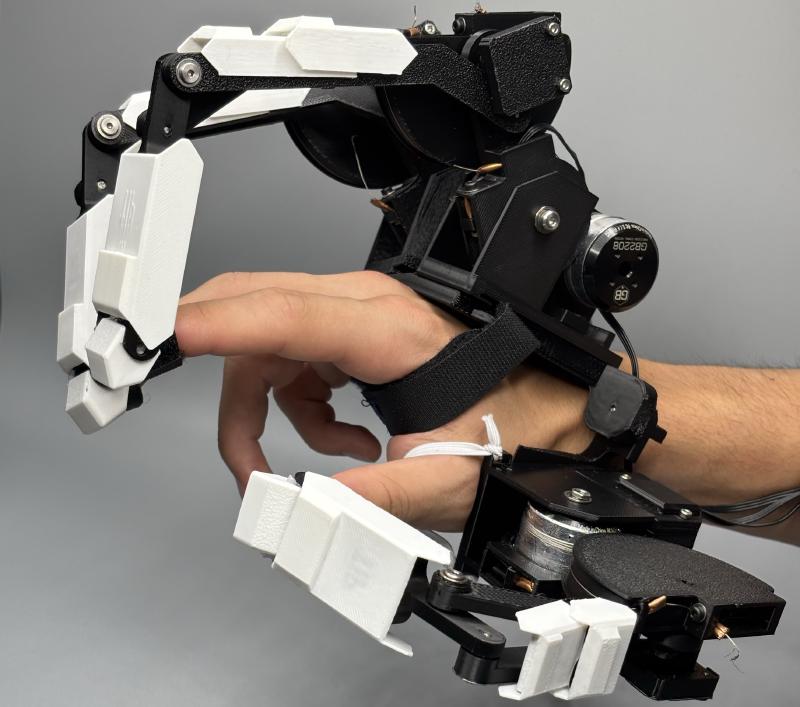
The N2D Glove provides active force-feedback in two dimensions for multiple fingers, allowing for complex teleoperation feedback like pushing buttons or inserting pegs into holes.
My Contributions#
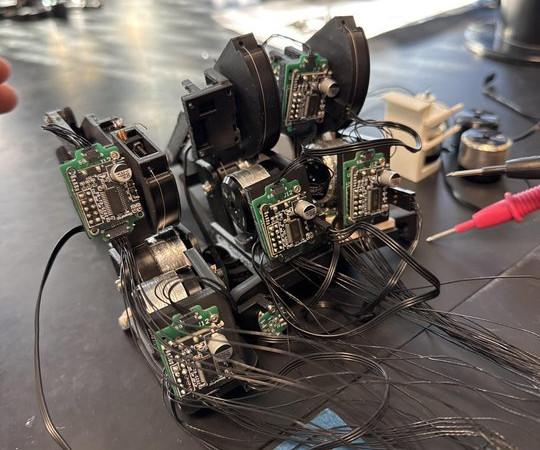
On the technical side, I fixed many bugs in the force-calibration procedure, which allows us to command a force with a direction and magnitude, and have that correctly delivered to the fingertip. This is a crucial part of making the novel 2D feature effective.
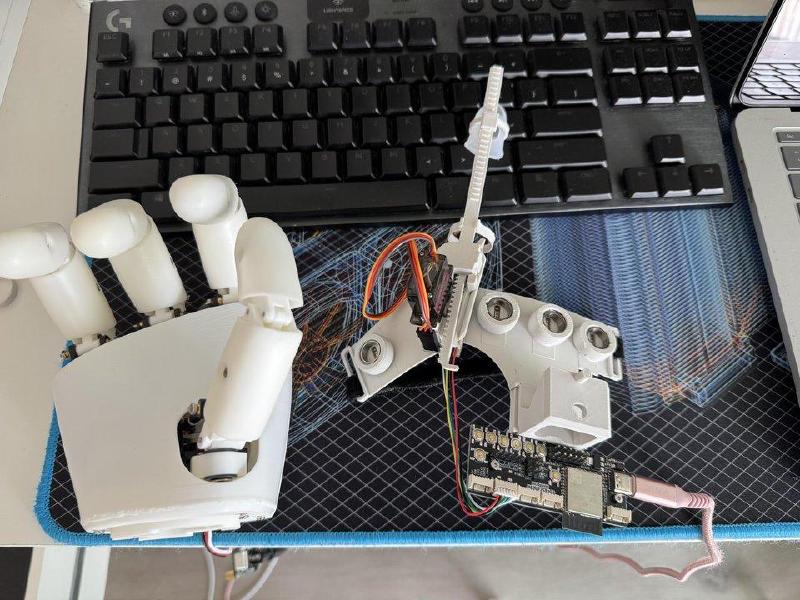
I worked on ROS2 integration with the Inspire Robotics hand to go from force-sensing on the robotic hand to force-delivering on the N2D Glove.
For the paper, I researched in-depth about the competing products and related works and found a perfect niche that this project solves.
Background#
I joined this project because I wanted to make a low-cost force-feedback control project using the AmazingHand and the LucidVR Glove. This would be a 1D version.
I saw the project at the Contextual Robotics Institute Demo Day and reached out to join. I am greatful to be a part of this project and I think there is lots of potential left to explore.